
Н ОВЫЕ ПУБЛИКАЦИИ РЕСУРСА 07 .07.2026 День Памяти. 7 июля. День памяти моего Отца. 01 .07.2026 Публикации о LCF в 2026 году (Июнь). Статьи и к ниги с упоминанием LCF опубликованные в июне 2026 года. 25 .06.2026 1803LarreyDJ . Автор описывает экзартикуляцию в тазобедренном суставе и методику пересечения LCF , которую именует «межсуставная связка». 16 .06.2026 1948EpsteinI . Реда ктор комментирует слова раввина Самуила (Шмуэля) в трактате Хуллин Вавилонского талмуда, поясняющего расположение LCF по отношению к суставу и ее отличие от седалищного нерва. 1753AstrucJ . Автор, анализируя книгу «Бытие» приводит текст на французском языке с упоминанием травмы тазобедренного сустава, повреждении LCF и последствиях инцидента. 29 .05.2026 Публикации о LCF в 2026 году (Май). Статьи и к ниги с упоминанием LCF опубликованные в мае 2026 года. 28 .05.2026 Интернет-журнал "О КРУГЛОЙ СВЯЗКЕ БЕДРА", май 2026 26 .05.2026 20c.Wikstro...

Моделирование перемещения общего центра масс тела
На настоящем этапе экспериментальных исследований
нами смоделировано перемещение общего центра масс тела на электромеханической модели тазобедренного сустава. Ее объемная тазовая часть соединялась с
бедренной частью, аналогом связки головки бедренной кости и аналогом комплекса коротких
мышц, вращающих бедро наружу. Вес тела воспроизводила нагрузка, присоединенная к
объемной тазовой части модели. Она прикреплялась на уровне расположения общего центра
масс тела человека в ортостатическом положении. Соответственно, аналог общего
центра масс тела на нашей модели находился на уровне изображения межпозвонкового
диска L5-S1 выше и
медиальнее центра шарнира, приблизительно в одной с ним фронтальной плоскости.
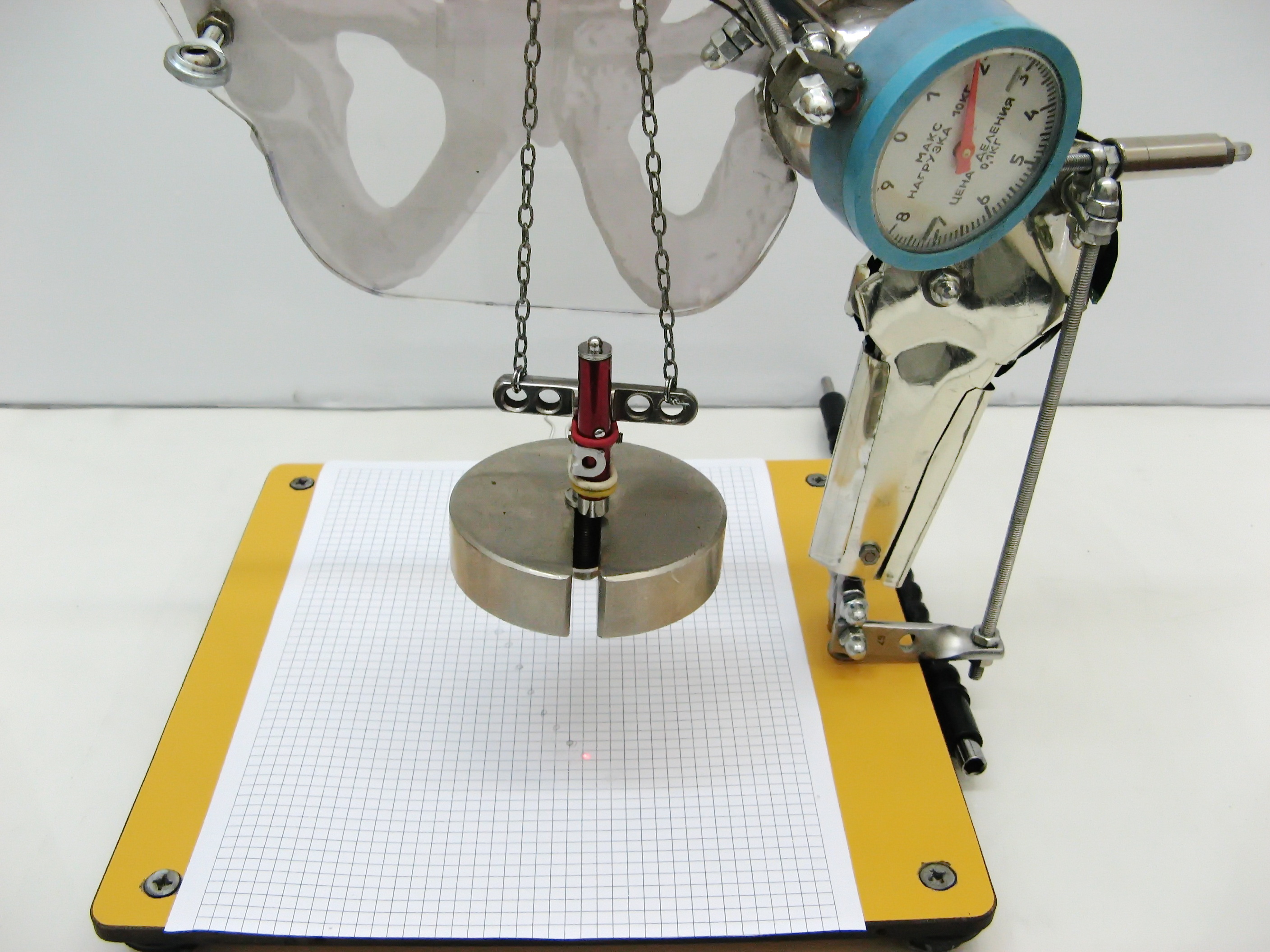
С целью уточнения перемещения проекции общего центра масс тела в горизонтальной плоскости мы
воспроизвели эффект авторотации в шарнире модели с включенной вертикально расположенной
лазерной указкой, закрепленной на нагрузке. Световое пятно от узконаправленного
источника света было хорошо заметно на масштабно-координатной сетке, которую мы
расположили на поверхности основания модели.
В начале опытов объемная тазовая часть модели находилась в исходном положении. В нем она была повернута вперед на 15° в горизонтальной плоскости, наклонена вниз в медиальную сторону во фронтальной плоскости с углом приведения в шарнире 7° и отклонена в сагиттальной плоскости вперед на 3°. После расположения объемной тазовой части модели с подвешенной нагрузкой в означенной позиции мы включили лазерную указку (Рис. 1).

 |
| Рис. 1. Электромеханическая модель тазобедренного сустава человека с нагруженной объемной тазовой частью, соединенной с бедренной частью, аналогом связки головки бедренной кости и аналогом комплекса коротких мышц, вращающих бедро наружу (исходное положение); вверху – вид сзади, внизу – вид сверху. |
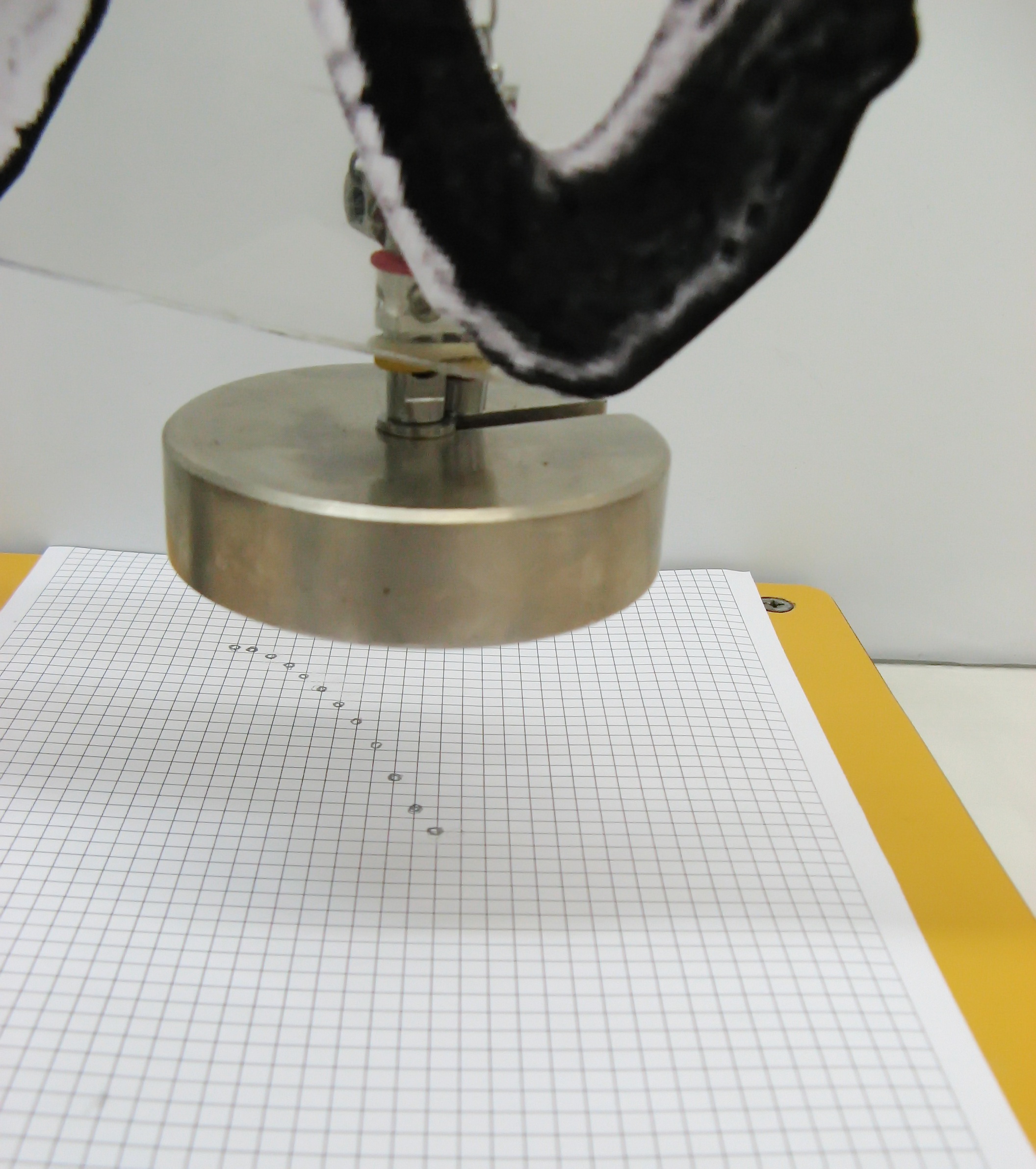
Световое пятно на масштабно-координатной сетке обведено
карандашом. Таким образом, мы зафиксировали начальное положение проекции на
горизонтальную плоскость области крепления нагрузки к объемной тазовой части
модели. Затем лазерная указка выключена, а длина аналога комплекса коротких
мышц, вращающих бедро наружу, уменьшена на 5 мм. Объемная тазовая часть модели
повернулась назад в горизонтальной плоскости и несколько приподнялась над
плоскостью опоры.
После обретения покоя объемной тазовой части модели
и подвешенной к ней нагрузки мы вновь включили лазерную указку (Рис. 2).

 |
| Рис. 2. Первый этап регистрации перемещения проекции на горизонтальную плоскость общего центра масс объемной тазовой части электромеханической модели тазобедренного сустава человека с аналогом связки головки бедренной кости при укорочении аналога комплекса коротких мышц, вращающих бедро наружу; вверху – вид сзади, внизу – вид сверху. |
Световое пятно на масштабно-координатной сетке сместилось
назад. Оно было обведено карандашом, что зафиксировало новое положение проекции
области крепления нагрузки к объемной тазовой части модели. Далее вышеописанный
цикл ступенчатого укорочения аналога комплекса коротких мышц, вращающих бедро наружу,
с перемещением объемной тазовой части назад в горизонтальной плоскости и
регистрация положения светового пятна на масштабно-координатной сетку нами
повторен десять раз
(Рис. 3 – 12).

 |
| Рис. 3. Второй этап регистрации перемещения проекции на горизонтальную плоскость общего центра масс объемной тазовой части электромеханической модели тазобедренного сустава человека с аналогом связки головки бедренной кости при укорочении аналога комплекса коротких мышц, вращающих бедро наружу; вверху – вид сзади, внизу – вид сверху. |

 |
| Рис. 4. Третий этап регистрации перемещения проекции на горизонтальную плоскость общего центра масс объемной тазовой части электромеханической модели тазобедренного сустава человека с аналогом связки головки бедренной кости при укорочении аналога комплекса коротких мышц, вращающих бедро наружу; вверху – вид сзади, внизу – вид сверху. |

 |
| Рис. 5. Четвертый этап регистрации перемещения проекции на горизонтальную плоскость общего центра масс объемной тазовой части электромеханической модели тазобедренного сустава человека с аналогом связки головки бедренной кости при укорочении аналога комплекса коротких мышц, вращающих бедро наружу; вверху – вид сзади, внизу – вид сверху. |

 |
| Рис. 6. Пятый этап регистрации перемещения проекции на горизонтальную плоскость общего центра масс объемной тазовой части электромеханической модели тазобедренного сустава человека с аналогом связки головки бедренной кости при укорочении аналога комплекса коротких мышц, вращающих бедро наружу; вверху – вид сзади, внизу – вид сверху. |

 |
| Рис. 7. Шестой этап регистрации перемещения проекции на горизонтальную плоскость общего центра масс объемной тазовой части электромеханической модели тазобедренного сустава человека с аналогом связки головки бедренной кости при укорочении аналога комплекса коротких мышц, вращающих бедро наружу; вверху – вид сзади, внизу – вид сверху. |

 |
| Рис. 8. Седьмой этап регистрации перемещения проекции на горизонтальную плоскость общего центра масс объемной тазовой части электромеханической модели тазобедренного сустава человека с аналогом связки головки бедренной кости при укорочении аналога комплекса коротких мышц, вращающих бедро наружу; вверху – вид сзади, внизу – вид сверху. |
 |
| Рис. 9. Восьмой этап регистрации перемещения проекции на горизонтальную плоскость общего центра масс объемной тазовой части электромеханической модели тазобедренного сустава человека с аналогом связки головки бедренной кости при укорочении аналога комплекса коротких мышц, вращающих бедро наружу; вверху – вид сзади, внизу – вид сверху. |

 |
| Рис. 10. Девятый этап регистрации перемещения проекции на горизонтальную плоскость общего центра масс объемной тазовой части электромеханической модели тазобедренного сустава человека с аналогом связки головки бедренной кости при укорочении аналога комплекса коротких мышц, вращающих бедро наружу; вверху – вид сзади, внизу – вид сверху. |

 |
| Рис. 11. Десятый этап регистрации перемещения проекции на горизонтальную плоскость общего центра масс объемной тазовой части электромеханической модели тазобедренного сустава человека с аналогом связки головки бедренной кости при укорочении аналога комплекса коротких мышц, вращающих бедро наружу; вверху – вид сзади, внизу – вид сверху. |

 |
| Рис. 12. Одиннадцатый, завершающий этап регистрации перемещения проекции на горизонтальную плоскость общего центра масс объемной тазовой части электромеханической модели тазобедренного сустава человека с аналогом связки головки бедренной кости при укорочении аналога комплекса коротких мышц, вращающих бедро наружу; вверху – вид сзади, внизу – вид сверху. |
После достижения минимальной длины аналога комплекса коротких мышц, вращающих бедро наружу, эксперимент приостановлен. Световое пятно переместилось в крайнюю точку своей траектории движения в горизонтальной плоскости, расположенную позади от центра шарнира (Рис. 13).
 |
| Рис. 13. Расположение светового пятна в крайней точке траектории его смещения в горизонтальной плоскости позади от центра шарнира электромеханической модели тазобедренного сустава человека, аналогом связки головки бедренной кости и аналогом комплекса коротких мышц, вращающих бедро наружу; вид на масштабно-координатную сетку сзади модели. |
После того, как крайнее положение светового пятна
на масштабно-координатной сетке было зафиксировано, лазерная указка выключена. В
шарнире модели наблюдалось супинация и отведения. Объемная тазовая часть модели
находилась в положении с поворотом назад горизонтальной и сагиттальной плоскости.
Во фронтальной плоскости ее край, противоположный шарниру, приподнялся над опорной
поверхностью. Означенное явилось проявлением эффекта автоотведения. При этом нагрузка,
подвешенная к объемной тазовой части модели, и точка ее крепления к грузовому
кронштейну (аналог общего центра масс тела) имели наибольшую высоту (Рис. 14).

 |
 |
| Рис. 14. Электромеханическая модель тазобедренного сустава человека с нагруженной объемной тазовой частью, соединенной с бедренной частью, аналогом связки головки бедренной кости и аналогом комплекса коротких мышц, вращающих бедро наружу (максимальная супинация в шарнире модели); вверху – вид спереди, стрелкой указана проекция прикрепления нагрузки к объемной тазовой части (аналог общего центра масс тела), в центре – вид спереди на подвешенную нагрузку и масштабно-координатную сетку, закрепленную на основании модели, внизу – вид сзади на подвешенную нагрузку и масштабно-координатную сетку. |
Положение нагрузки, подвешенной к объемной тазовой
части модели, и точка ее крепления к грузовому кронштейну имели наименьшую
высоту над плоскостью опоры в исходном положении модели (Рис. 15).

 |
| Рис. 15. Электромеханическая модель тазобедренного сустава человека с нагруженной объемной тазовой частью, соединенной с бедренной частью аналогом связки головки бедренной кости и аналогом комплекса коротких мышц, вращающих бедро наружу (исходное положение); вверху – вид спереди, стрелкой указана проекция прикрепления нагрузки к объемной тазовой части (аналог общего центра масс тела), в центре – вид спереди на подвешенную нагрузку и масштабно-координатную сетку, закрепленную на основании модели, внизу – вид сзади на подвешенную нагрузку и масштабно-координатную сетку. |
Описанный эксперимент продемонстрировал, что при воспроизведении на модели супинации нагрузка, подвешенная к объемной тазовой части модели, приподнимается над плоскостью опоры благодаря эффекту автоотведения. Потенциальную энергию системы с приподнятым телом возможно рассчитать по общеизвестной формуле:
Еп=mgh, где Еп
– потенциальная энергия системы,
Дж; m – масса, кг; h – высота подъёма общего центра масс, м; g – ускорение свободного
падения, м/с2. В нашем
случае потенциальная энергия передавалась системе посредством укорочения в
ручном режиме аналога комплекса коротких мышц, вращающих бедро наружу.
При удлинении аналога комплекса коротких мышц, вращающих
бедро наружу, в шарнире модели воспроизводилась пронация, обусловленная эффектом
авторотации. Запасенная потенциальная энергия системы преобразовывалась в
кинетическую энергию движения объемной тазовой части модели вниз во фронтальной
плоскости и вперед в горизонтальной плоскости.
Для материальной точки кинетическая энергия
Ек
при перемещении тела определяется как работа силы, ускорившей тело от нулевой
скорости до определенной величины скорости. Она может быть рассчитана по формуле:
Ек= ½ mu2,
где Ек – кинетическая энергия, Дж; u – скорость движения системы, м/с; m – масса тела, кг.
Скорость движения объемной тазовой части модели
определялась скоростью вращения электропривода, посредством которого удлинялся
аналог комплекса коротких мышц, вращающих бедро наружу. В экспериментах на механической модели тазобедренного сустава человека мы отмечали, что эффект авторотации
тазовой части модели с подвешенной нагрузкой – исключительно скоротечный
процесс. Введение в конструкцию модели аналога комплекса коротких мышц,
вращающих бедро наружу, позволило получить контроль над скоростью спонтанного перемещения
объемной тазовой части модели в горизонтальной плоскости.
По нашему мнению, в реальных условиях назначение
комплекса коротких мышц, вращающих бедро наружу, заключается в контроле над
спонтанным поворотом таза, pelvis, вперед в
горизонтальной плоскости и пронацией при ходьбе в середине одноопорного периода
шага. Данный момент означенные мышцы функционируют в уступающем режиме. Они
активно сокращаются при супинации в тазобедренном суставе, articulatio coxae, переносной ноги
с целью подготовки выше означенного движения.
Из положения с максимальным отклонением объемной
тазовой части модели назад и вверх, используя электропривод, мы произвели
укорочение аналога комплекса коротких мышц, вращающих бедро наружу при включенной
лазерной указке
(Рис. 16).

 |
| Рис. 16. Этап укорочения аналога комплекса коротких мышц, вращающих бедро наружу электромеханической модели тазобедренного сустава человека с нагруженной объемной тазовой частью, соединенной с бедренной частью, аналогом связки головки бедренной кости и аналогом комплекса коротких мышц, вращающих бедро наружу (положение объемной тазовой части модели приблизительно в средине цикла перемещения); вверху – вид спереди на модель, стрелкой указана проекция прикрепления нагрузки к объемной тазовой части (аналог общего центра масс тела), внизу – вид спереди на подвешенную нагрузку и масштабно-координатную сетку со световым пятном. |
При удлинении электроприводом аналога комплекса коротких
мышц, вращающих бедро наружу, объемная тазовая часть модели спонтанно
наклонялась вниз в медиальную сторону во фронтальной плоскости и поворачивалась
вперед в горизонтальной плоскости. При этом уменьшалась высота расположения
объемной тазовой части модели. Закономерно смещалась вниз подвешенной к ней
нагрузка, а также область аналога общего центра масс тела. Потенциальная
энергия системы уменьшалась, трансформируясь в кинетическую энергию. Движение объемной
тазовой части модели прекращалось после достижения исходного положения, при
котором она была максимально повернута вперед, а в шарнире модели
присутствовало предельное приведение и пронация. Световое пятно перемещалось по
той же траектории, что и при укорочении в ручном режиме аналога комплекса коротких
мышц, вращающих бедро наружи, имитации в шарнире модели супинации и отведения.
Опыт показал, что вне зависимости от направления движения
объемной тазовой части модели, область аналога общего центра масс тела
перемещалась по одинаковой пространственной кривой. Ее проекция на
горизонтальную ось представляла собой траекторию, напоминающую часть гиперболической
кривой. Начальная точка кривой совпадала с областью проекции нагрузки на
горизонтальную плоскость в положении максимальной супинации и отведения (Рис. 17).

 |
| Рис. 17. Проекция перемещения аналога общего центра масс на горизонтальную плоскость при воспроизведении эффекта авторотации; вверху – положения световых пятен на масштабно-координатной сетке, соответствующих разным этапам перемещения объемной тазовой части модели, внизу – желтым цветом обозначена траектория перемещения светового пятна. |
Движение светового пятна в горизонтальной плоскости
происходило по гиперболической кривой, а не по дуге окружности. Отмечено, что
координата светового пятна, указывающая проекцию нагрузки на горизонтальную
плоскость, при воспроизведении эффекта авторотации, перемещалась поступательно и
вперед, и в медиальную сторону (Рис. 18).
 |
| Рис. 18. Кривая перемещения проекции аналога общего центра масс на горизонтальную плоскость при воспроизведении эффекта авторотации; условные обозначения: желтым обозначена кривая перемещения светового пятна по масштабно-координатной сетке, А – начальное положение проекции аналога общего центра масс на горизонтальную плоскость (вершина гиперболической кривой), В – конечное положение проекции аналога общего центра масс на горизонтальную плоскость, отрезок АО – величина поступательного перемещения проекции аналога общего центра масс вперед, отрезок ОВ – величина поступательного перемещения проекции аналога общего центра масс в медиальном направлении (расстояние между узлами масштабно-координатной сетки 5 мм). |
Изучение кривой перемещения светового пятна в
горизонтальной плоскости показывает, что при авторотации общий центр масс тела одновременно
поступательно перемещается вперед и в медиальном направлении. За счет
поступательного перемещения в медиальном направлении увеличивается плечо веса
тела. Соответственно, это должно приводить к увеличению нагрузки сначала на аналог
отводящей группу мышц (если он имеется), а затем и аналог связки головки бедренной
кости модели.
Моделированный нами эпизод перемещения общего
центра масс тела вперед в норме происходит на величину около 8-9 см. Он наблюдается
в середине одноопорного периода шага, происходит спонтанно, но лишь контролируется
мышцами супинаторами и пронаторами тазобедренного сустава, articulatio coxae. Это позволяет
снизить затраты мышечной энергии при ходьбе.
Гиперболу можно описать как множество точек, образуемое в результате сечения кругового конуса плоскостью, отсекающей обе части конуса. Начерченная нами гиперболическая кривая движения общего центра масс объемной тазовой части модели косвенно указывает на то, что связка головки бедренной кости, ligamentum capitis femoris, при ходьбе перемещается подобно трехмерному коническому маятнику. Изменение энергии модели при реализации эффекта авторотации аналогично трансформации энергии при движении маятника.
Смотри также:
Бедренная часть комбинированной модели тазобедренного сустава
Элементы электромеханической модели тазобедренного сустава человека
Электромеханическая модель без аналогов связок
Упрощение электромеханической модели тазобедренного сустава
Моделирование движений аналога LCF
Упрощенная модель вертлужной впадины
Модель как аналог рычага третьего рода
Моделирование действия веса тела
Имитация взаимодействия средней ягодичной мышцы и LCF
Анализ взаимодействия средней ягодичной мышцы и LCF
Моделирование движений в горизонтальной плоскости
Моделирование эффекта авторотации
Обсуждение эффекта авторотации
Критика
Главным недочетом описанных ранее конструкций, по нашему мнению, являлась недостаточная упругость аналогов связок. В описанной конструкции мы использовали гибкий элемент - аналог LCF, выполненный из металла и усовершенствовали способ его крепления. В норме LCF присоединяется к вертлужной впадине в нескольких точках, что нам воспроизвести не удалось. Кроме этого, основой бедренной части модели явился субтотальный эндопротез тазобедренного сустава. Мы согласны с тем, что данное медицинское изделие лишь отчасти воспроизводит проксимальный отдел нативной бедренной кости.
Примечания
Экспериментальные исследования на обсуждаемой модели начались в 2009 году. Полная сборка конструкции описана в заявка на изобретение RU2009124926A. Впервые полную версию представленного выше экспериментального материала мы опубликовали в пятнадцатой главе третьего тома монографии с юмором названой «Биомеханика пингвинов» (2018) [academia.edu]. Данная работа написана для личного использования и узкого круга лиц. В книге собраны, систематизированы и проанализированы результаты 25-ти лет изучения ligamentum capitis femoris и смежных тем.
Первоисточник
Архипов СВ. Биомеханика пингвинов: заметки к вопросу о причинах ковыляющей походки и перспективах ее ремоделирования во имя обретения грациозности, сочиненные врачом, к.м.н. Сергеем Васильевичем Архиповым, в бытность им с 1992-го по 2017-й год хирургом и травматологом-ортопедом, по вдохновению в 1991-ом году его сестрою Еленой Васильевной, со светлой любовью к ней и благодарностью! Манускрипт в 5 томах. Т. 3. Главы 12-16. Напечатано Автором во граде Королев при попечении его супруги Людмилы Николаевны, ММXVIII A.D. [2018], bonum factum! [на благо и счастье], 518 с. [academia.edu]
Ключевые слова
ligamentum capitis femoris, ligamentum teres, связка головки бедра, функция, эксперимент, электромеханическая модель, средняя ягодичная мышца, короткие ротаторы