
Н ОВЫЕ ПУБЛИКАЦИИ РЕСУРСА 07 .07.2026 День Памяти. 7 июля. День памяти моего Отца. 01 .07.2026 Публикации о LCF в 2026 году (Июнь). Статьи и к ниги с упоминанием LCF опубликованные в июне 2026 года. 25 .06.2026 1803LarreyDJ . Автор описывает экзартикуляцию в тазобедренном суставе и методику пересечения LCF , которую именует «межсуставная связка». 16 .06.2026 1948EpsteinI . Реда ктор комментирует слова раввина Самуила (Шмуэля) в трактате Хуллин Вавилонского талмуда, поясняющего расположение LCF по отношению к суставу и ее отличие от седалищного нерва. 1753AstrucJ . Автор, анализируя книгу «Бытие» приводит текст на французском языке с упоминанием травмы тазобедренного сустава, повреждении LCF и последствиях инцидента. 29 .05.2026 Публикации о LCF в 2026 году (Май). Статьи и к ниги с упоминанием LCF опубликованные в мае 2026 года. 28 .05.2026 Интернет-журнал "О КРУГЛОЙ СВЯЗКЕ БЕДРА", май 2026 26 .05.2026 20c.Wikstro...

Электромеханическая модель тазобедренного сустава человека без аналогов связок
На
данном этапе исследований на электромеханической модели с объемной тазовой частью изучено функционирование тазобедренного
сустава без связочного аппарата. При отсутствии аналогов
связок и аналогов
мышц объемная тазовая часть устанавливалась сверху на
сферическую головку бедренной части модели. Тазовый элемент объемной тазовой
части располагался во фронтальной плоскости. При этом изображения обеих крыльев
тазовых костей, ala ossis ilii, находились на
одном уровне. Указанное положение по нашему замыслу воспроизводило одноопорную
ортостатическую позу, в которой опорной является правая нижняя конечность.
Отмечено, что при любом положении объемной тазовой
части она самостоятельно не удерживалась на сферической головке бедренной
части. Дополнение конструкции модели аналогом комплекса коротких
мышц, вращающих бедро наружу, также не позволяло стабилизировать объемную тазовую часть. Эти опыты показали, что короткие
мышцы, вращающие бедро наружу, неспособны стабилизировать таз, pelvis.
В
известных моделях тазобедренного сустава в качестве стабилизатора тазовой части
применялись пружины и динамометры (Pauwels F., 1965; Гиммельфарб
А.Л., Акбердина Д.Л., 1983; Беленький В.Е., 1962). Они имитировали отводящую
группу мышц. При рассмотрении функции отводящей группы мышц чаще всего
обсуждается значение средней ягодичной мышцы, musculus gluteus medius. Она располагается в одной фронтальной
плоскости с центром тазобедренного сустава, articulatio
coxae,
и вершиной большого вертела, trochanter major, бедренной кости, os femur. Представляется логичным мнение, что роль
средней ягодичной мышцы, musculus gluteus medius, в стабилизации таза, pelvis, – ключевая.
В
настоящих экспериментах мы воспроизвели функцию средней ягодичной мышцы, musculus gluteus medius, присоединив ее
аналог к модели по описанной ранее методике. Для снижения трения в
шарнире модели на его контактирующие поверхности наносилась смазка. Вращая резьбовую
втулку, мы изменяли общую длину аналога средней ягодичной мышцы. При этом объемная тазовая часть перемещалась во фронтальной плоскости. Положение
объемной тазовой части во фронтальной плоскости определялось визуально, а точная
величина наклона устанавливалась посредством угломера. Кроме этого, угломером
определялся и угол наклона наружного края вертлужного элемента. Усилие, необходимое
для удержания объемной тазовой части в положении равновесия,
определялось динамометром, имевшимся в конструкции аналога средней
ягодичной мышцы.
В
первой серии экспериментов мы уточнили изменение показаний динамометра в зависимости
от положения тазового элемента объемной тазовой части
модели без
подвешивания к объемной тазовой части модели нагрузки (Рис. 1).
 |
| a |
 |
| b |
 |
| c |
 |
| d |
 |
| e |
 |
| f |
 |
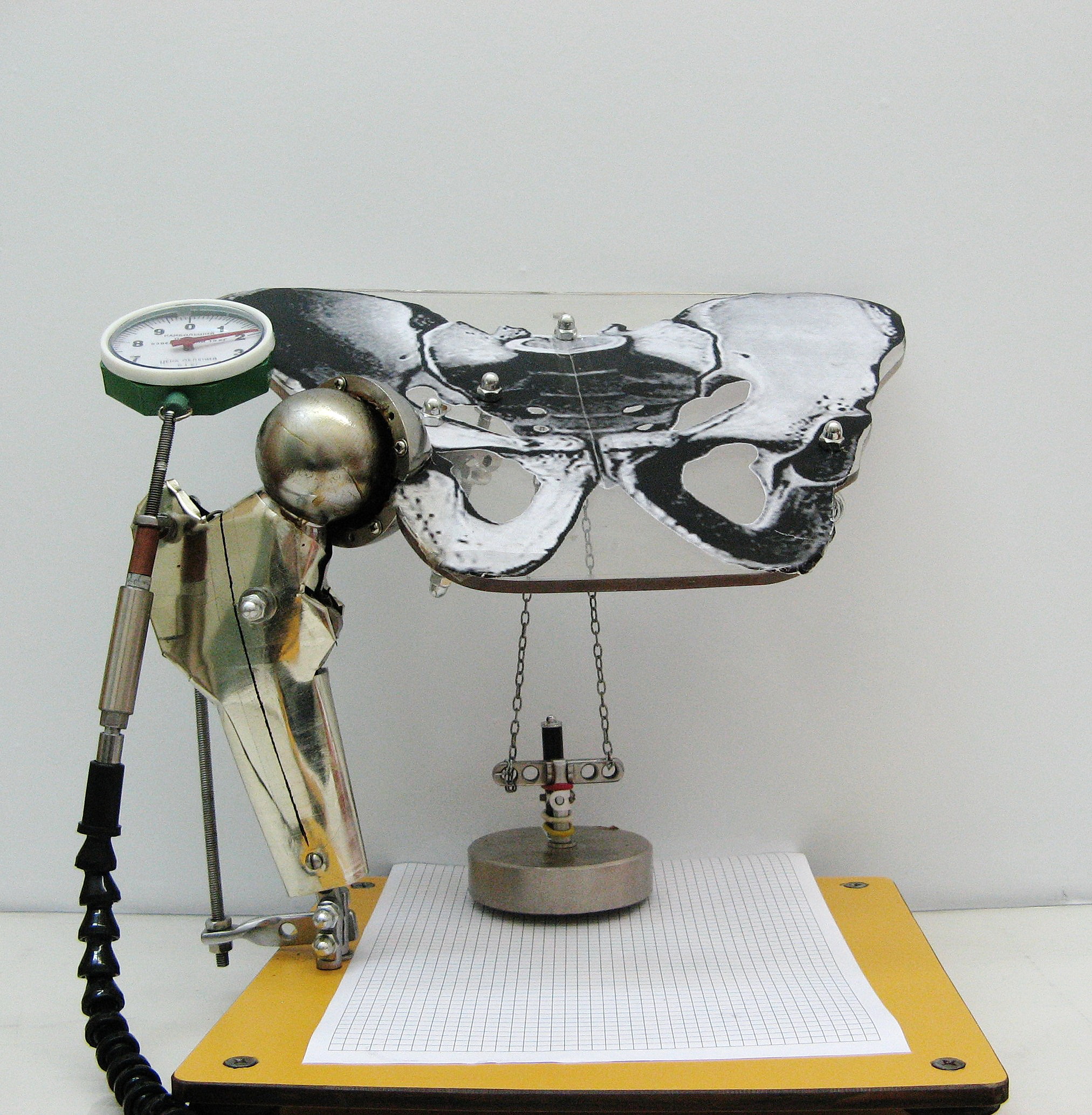
| g Рис. 1. Электромеханическая модель тазобедренного сустава человека с объемной тазовой частью, соединенной с бедренной частью аналогом средней ягодичной мышцы (вид спереди); регистрация изменения положения тазового элемента и показаний динамометра: a – наклон в латеральную сторону 15°, b – наклон в латеральную сторону 10°, c – наклон в латеральную сторону 5°, d – горизонтальное положение тазового элемента, e – наклон в медиальную сторону 5°, f – наклон в медиальную сторону 10°, g – наклон в медиальную сторону 15°. |
Изначально нами отрегулирована длина аналога
средней ягодичной мышцы таким образом, что тазовый элемент объемной тазовой части модели имел наклон в латеральную сторону 15°. При
этом в шарнире модели было воспроизведено отведение в реальном тазобедренном
суставе, articulatio coxae. Затем путем
увеличения длины аналога средней ягодичной мышцы мы наклоняли тазовый элемент объемной тазовой части модели вниз в медиальную сторону. Тем самым
имитировалось приведение в нативном тазобедренном суставе, articulatio coxae.
При
наклоне тазового элемента объемной тазовой части
модели в
латеральную сторону на угол 15° показание динамометра составило 0.5 кг. Означенное
усилие оказалось минимальным и соответствовало максимальному отведению в шарнире
модели. В указанном положении плечо действующего веса объемной тазовой части было наименьшим. При горизонтальной позиции
тазового элемента динамометр регистрировал усилие 0.85 кг. Максимальное
показание динамометра 1.0 кг наблюдалось при наклоне тазового элемента в
медальную сторону на угол 15°, то есть при максимальном приведении в наших
опытах. В этом положении плечо действующего веса объемной
тазовой части было наибольшим. Сделанные наблюдения удовлетворительно поясняются
правилом моментов для рычага, находящегося в равновесии.
Аналог
средней ягодичной мышцы удовлетворительно удерживал объемную тазовую часть модели в равновесии во фронтальной плоскости. Устойчивость
легко нарушалась при воздействии в сагиттальной и горизонтальной плоскости. При
ориентации тазового элемента объемной тазовой части модели строго во
фронтальной плоскости усилия аналога средней ягодичной мышцы было вполне достаточно
для стабилизации системы.
На
следующем этапе экспериментального исследования мы уточнили изменение показаний
динамометра при разных положениях тазового элемента объемной тазовой части модели с нагрузкой.
Изначально груз подвешивался к крайнему отверстию грузового кронштейна тазового элемента объемной тазовой части модели. При подобном закреплении нагрузки нами
воспроизводилось действие веса тела, приложенного к общему центру масс,
находящемуся на
уровне межпозвонкового диска L5-S1. Применительно
к нашей модели он локализовался выше и медиальнее центра шарнира. Подобное
расположение груза выводило из равновесия объемную
тазовую часть модели. Несмотря на присоединенный аналог средней
ягодичной мышцы, объемная тазовая часть модели отклонялась назад в
сагиттальной плоскости, а в шарнире модели воспроизводилось разгибание. При достижении
разгибания около 90° вертлужный элемент объемной тазовой части модели
разобщался со сферической головкой бедренной части модели, после чего объемная
тазовая часть модели падала на основание (Рис. 2).
 |
| Рис. 2. Этапы выведения из положения равновесия объемной тазовой части электромеханической модели тазобедренного сустава человека при подвешивании нагрузки к крайнему отверстию грузового кронштейна тазового элемента объемной тазовой части; вверху – спонтанное воспроизведение разгибания в шарнире модели, внизу – падение объемной тазовой части (вид спереди). |
Эксперимент продемонстрировал, что расположение
общего центра масс тела кзади от центра опорного тазобедренного сустава, articulatio coxae, в одноопорной
ортостатической позе способен вывести тело из положения равновесия.
С учетом описанного наблюдения на следующем этапе
мы воспроизвели расположение общего центра масс на уровне межпозвонкового диска L5-S1 выше и
медиальнее центра опорного тазобедренного сустава, articulatio
coxae,
но в одной с ним фронтальной плоскости. Для этого груз подвешивался к отверстию грузового кронштейна, ближайшего к тазовому элементу объемной тазовой части модели. Подобное закрепление нагрузки не создавало
вращающего момента в сагиттальной плоскости. Объемная тазовая часть модели
сохраняла устойчивость во фронтальной, сагиттальной и горизонтальной плоскости.
При этом наклону вниз в медиальную сторону объемной тазовой части и ее падению
препятствовал аналог
средней ягодичной мышцы. На описанной конфигурации сборки модели эффект
автостабилизации, авторотации, автолатерализации и автоотведения не
воспроизводился. Шарнир во фронтальной плоскости стопорился аналогом средней
ягодичной мышцы. В покое его усилие обеспечивало прижатие вертлужного элемента объемной тазовой части к сферической головке бедренной части модели.
Затем мы отрегулировали длину аналога
средней ягодичной мышцы таким образом, что тазовый элемент объемной тазовой части модели имел наклон в латеральную сторону 15°. В
результате в шарнире модели воспроизведено положение аналогичное отведению в
реальном тазобедренном суставе, articulatio coxae. Далее, путем увеличения длины аналога
средней ягодичной мышцы мы наклоняли тазовый элемент объемной тазовой части модели вниз в медиальную сторону. Это имитировало
движение, аналогичное приведению в нативном тазобедренном суставе, articulatio coxae (Рис. 3).
 |
| a |
 |
| b |
 |
| c |
 |
| d |
 |
| e |
 |
| f |
 |
g Рис. 3. Электромеханическая модель тазобедренного сустава человека с объемной тазовой частью, соединенной с бедренной частью аналогом средней ягодичной мышцы (вид спереди), нагрузка подвешена в плоскости опорного шарнира; регистрация изменения положения тазового элемента и показаний динамометра: a – наклон в латеральную сторону 15°, b – наклон в латеральную сторону 10°, c – наклон в латеральную сторону 5°, d – горизонтальное положение тазового элемента, e – наклон в медиальную сторону 5°, f – наклон в медиальную сторону 10°, j – наклон в медиальную сторону 15°. |
Минимальное показание динамометра наблюдалось при наклоне тазового элемента объемной тазовой части модели в латеральную сторону на угол 15°. Указанное соответствовало максимальному отведению в шарнире модели. В этом положении в шарнире модели плечо действующего веса объемной тазовой части было минимальным. Максимальное показание динамометра зарегистрировано при наклоне тазового элемента объемной тазовой части модели в медальную сторону на угол 15°, то есть при максимальном приведении. В означенном случае плечо действующего веса объемной тазовой части максимально увеличилось. При изменении положения объемной тазовой части нами регистрировался угол наклона тазового элемента модели и наклон вертлужной элемента во фронтальной плоскости, а также записывались соответствующие им показания динамометра аналога средней ягодичной мышцы. Кроме этого, мы замеряли плечо аналога отводящей группы мышц и плечо действующей нагрузки. После этого нами рассчитано их соотношение. Данные, полученные в эксперименте, обработаны и сведены в таблицу 1.
Таблица 1.
Эксперименты на
модели без аналогов связок
|
Угол наклона тазового элемента модели (градусы) |
Плечо аналога отводящей группы мышц (см) |
Плечо действующей нагрузки (см) |
Соотношение плеч рычага |
Усилие динамометра (кг) |
Наклон вертлужного элемента (градусы) |
|
+15 (отведение) |
6.66 |
5.56 |
1.19:1 |
1.5 |
35.8 |
|
+10 (отведение) |
6.85 |
6.47 |
1.05:1 |
1.7 |
38.1 |
|
+5 (отведение) |
6.62 |
7.60 |
1:1.14 |
1.9 |
44.4 |
|
0 |
6.62 |
9.72 |
1:1.46 |
2.5 |
53.1 |
|
-5 (приведение) |
6.39 |
11.18 |
1:1.74 |
2.6 |
58.2 |
|
-10 (приведение) |
6.58 |
11.41 |
1:1.85 |
2.8 |
62.9 |
|
-15 (приведение) |
6.27 |
11.93 |
1:1.9 |
2.9 |
64.7 |
При изменении положения тазового элемента во фронтальной плоскости в интервале от 15° приведения до 15° отведения усилие, зарегистрированное динамометром аналога средней ягодичной мышцы, уменьшалось. Чем меньше было плечо действующей нагрузки, тем меньшее действующее усилие показывал динамометр аналога средней ягодичной мышцы и наоборот. Плечо действующей нагрузки увеличивалось по мере наклона объемной тазовой части вниз в медиальную сторону. Величина плеча аналога средней ягодичной мышцы изменялась незначительно – около 1 см.
Во
фронтальной плоскости грузовой кронштейн объемной
тазовой части перемещался по дуге радиусом 15.4 см. Подмечено, что объемная тазовая
часть была крайне неустойчива в сагиттальной плоскости с тенденцией к
опрокидыванию назад. Означенное воспроизводило спонтанное разгибание в шарнире
модели. В пробных опытах без смазки шарнира нагрузка, регистрируемая динамометром,
уменьшалась за счет увеличения трения. В среднем отличие в показаниях
динамометра со смазкой и без смазки в шарнире модели составило около 0.1-0.2 кг
(Рис. 4).

 |
| Рис. 4. Электромеханическая модель тазобедренного сустава человека с объемной тазовой частью, соединенной с бедренной частью аналогом средней ягодичной мышцы (вид спереди), нагрузка подвешена в плоскости опорного шарнира модели: слева – без смазки в шарнире, справа – со смазкой в шарнире. |
Объемная тазовая часть модели удерживалась во фронтальной плоскости в положении покоя аналогом средней ягодичной мышцы. В данном случае условие равновесия системы представляет собой аналог рычага первого рода. С одной стороны действовала подвешенная к объемной тазовой части нагрузка, а с другой стороны ей противодействовало усилие аналога средней ягодичной мышцы.
Смотри также:
Бедренная часть комбинированной модели тазобедренного сустава
Элементы электромеханической модели тазобедренного сустава человека
Электромеханическая модель без аналогов связок
Критика
Главным недочетом описанных ранее конструкций, по нашему мнению, являлась недостаточная упругость аналогов связок. В описанной конструкции мы использовали гибкий элемент - аналог LCF, выполненный из металла и усовершенствовали способ его крепления. В норме LCF присоединяется к вертлужной впадине в нескольких точках, что нам воспроизвести не удалось. Кроме этого, основой бедренной части модели явился субтотальный эндопротез тазобедренного сустава. Мы согласны с тем, что данное медицинское изделие лишь отчасти воспроизводит проксимальный отдел нативной бедренной кости.
Примечания
Экспериментальные исследования на обсуждаемой модели начались в 2009 году. Полная сборка конструкции описана в заявка на изобретение RU2009124926A. Впервые полную версию представленного выше экспериментального материала мы опубликовали в четырнадцатой главе третьего тома монографии с юмором названой «Биомеханика пингвинов» (2018) [academia.edu]. Данная работа написана для личного использования и узкого круга лиц. В книге собраны, систематизированы и проанализированы результаты 25-ти лет изучения ligamentum capitis femoris и смежных тем.
Первоисточник
Архипов СВ. Биомеханика пингвинов: заметки к вопросу о причинах ковыляющей походки и перспективах ее ремоделирования во имя обретения грациозности, сочиненные врачом, к.м.н. Сергеем Васильевичем Архиповым, в бытность им с 1992-го по 2017-й год хирургом и травматологом-ортопедом, по вдохновению в 1991-ом году его сестрою Еленой Васильевной, со светлой любовью к ней и благодарностью! Манускрипт в 5 томах. Т. 3. Главы 12-16. Напечатано Автором во граде Королев при попечении его супруги Людмилы Николаевны, ММXVIII A.D. [2018], bonum factum! [на благо и счастье], 518 с. [academia.edu]
Ключевые слова
ligamentum capitis femoris, ligamentum teres, связка головки бедра, функция, эксперимент, электромеханическая модель, отводящая группа мышц